
Роботы столетиями восхищают человеческий разум, начиная от древних рассказов про каменных големов и заканчивая современной научной фантастикой. Хотя термин «робот» впервые был применен Карлом Чапеком только в 1921 году, человечество пыталось создавать автономные машины еще с 4 века до нашей эры.
Античные роботы: голубь Архита и Клепсидра Ктесибия
Корни робототехники берут свое начало еще в Древней Греции. Аристотель был одним из первых великих мыслителей, который задумался об автоматизации механизмов и о том, как эти приборы повлияют на общество в целом. Примерно в 400 г. до н.э. греческий математик, механик и философ Архит Тарентский создал первый в истории паровой аппарат.

Его деревянная конструкция была основана на анатомии голубя и имела установленный воздухонепроницаемый, генерирующий пар. Давление пара в конечном итоге превышало сопротивление конструкции, из-за чего птица-робот могла летать на небольшие расстояния.
В 250 году до н.э. механик Ктесибий создал Клепсидру — водяные часы, работа которых была основана на сложных автоматизированных процессах. Позже римские изобретатели обновили базовую конструкцию часов, добавив нее такие элементы, как колокольчики, гонги и движущиеся фигурки.

Но не только древние греки и римляне экспериментировали с робототехникой. Есть рассказы об автоматизированных устройствах из древнего Китая. Например, в отрывке из «Ли Цзы», Конфуция, датируемом III веком до н.э. описывается поющий и танцующий робот, который выступал для короля Му из Чжоу. Согласно тексту, робот был построен изобретателем по имени Йен Ши из дерева и кожи.
XII — XV век: человекоподобные машины и рыцарь Леонардо да Винчи
Одним из самых знаменитых изобретателей того времени можно назвать турка Исмаила аль-Джазари. Ему приписывают создание сегментных механизмов и называют отцом робототехники. Его автоматизированные механизмы приводились в движение водой. Так, турецкий механик изобрел автоматизированные двери и даже человекоподобную служанку, которая могла самостоятельно наливать напитки.

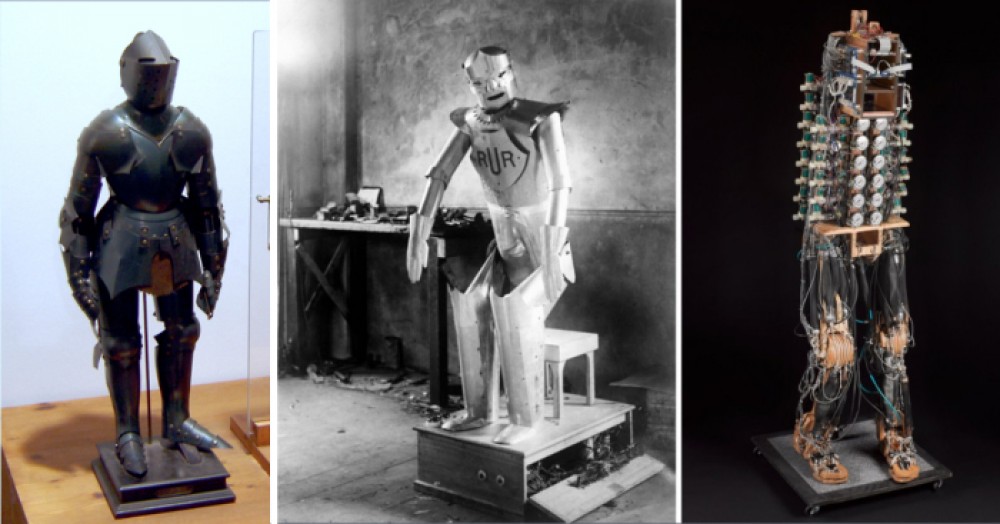
Влияние Аль-Джазари особенно заметно в более поздних работах Леонардо да Винчи. В 1495 году известный итальянский художник и инженер разработал автономного рыцаря, который с помощью набора шестеренок мог двигать руками и челюстями, и даже сидеть.

Робот-гуманоид был во многом основан на собственном исследовании анатомии да Винчи и использовался, по-видимому, в качестве развлечения на званых ужинах.
XVI — XVIII век: летающие роботы и музыкальные автоматы
Создание роботов для развлечения стало популярным ремеслом в период с 16 по 18 век. Хотя эти устройства и создавались для развлечения, многие из применявшихся в них технологий стали основой для более сложных роботов в дальнейшем. К одной из таких разработок можно отнести железного орла, построенного немецким математиком Иоганном Мюллером.
Об орле Мюллера известно немного, кроме того, что он был сделан из дерева и железа в 1530-х годах. В 1708 году Джон Уилкинс написал отчет об орле-роботе, утверждая, что он полетел для приветствия прусского императора. Математику также приписывают создание роботизированной мухи, которая тоже могла летать.

Другой ключевой фигурой в истории робототехники того времени был Жак де Вокансон, который в 1737 году создал устройство под названием «The Flute Player». Это был гуманоидный музыкальный автомат, который мог воспроизводить до двенадцати различных песен на флейте.
Устройство имело «сильфон», чтобы «дышать», подвижный рот и язык, которые меняли поток воздуха и играли на инструменте. Однако самым запоминающимся достижением Вокансона стала механизированная утка, которая могла поедать зерна и делать имитацию их переваривания и испражнения.
XIX век: шахматные машины и ранние эксперименты с речью
19-й век стал веком создания первых вычислительных машин, которые в свою очередь дали сильный толчок развитию робототехники. Популярным роботом в то время был аппарат, играющий в шахматы. За сто с лишним лет было создано несколько подобных автоматов. Большинство из них имели человекоподобную форму, имитирующую игрока в шахматы.

Как выяснилось позже, подобные машины на самом деле были обманом, а в ящике прятался реальный шахматист, который вел игру. Тем не менее, подобные псевдо автоматические устройства подтолкнули к созданию реальных шахматных аппаратов в начале XX века.
Однако, еще одно знаменитое устройство XIX века Euphonia, безусловно, не было обманом. Euphonia — говорящий, поющий робот, в котором была реализована ранняя технология преобразования текста в речь. Робот был создан австрийским математиком и изобретателем Джозефом Фабером. Машина имела гуманоидное женское лицо, соединенное с клавиатурой, с помощью которой можно было контролировать движение губ, челюстей и языка.

Сильфон и нить из слоновой кости имитировали человеческий голос, а тональность регулировалась с помощью специального винта.
Начало XX века: Роботы Эрик и Гакутенсоку
Во время Первой мировой войны немцы применяли беспилотные миниатюрные танки-бомбы, которые работали на радиоуправлении.

1928 год ознаменовался созданием первого британского робота по имени Эрик. Человекоподобный робот был создан инженером Аланом Реффеллом и ветераном войны Уильямом Ричардсом. Робот, управляемый двумя людьми, мог двигать головой и руками и разговаривать по радио в режиме реального времени. Его движения контролировались серией шестеренок, веревок и шкивов.

В следующем году дебютировал первый японский робот — Гакутенсоку. По данным Novate.ru, построенный в 1929 году биологом Макото Нисимурой, Гакутенсоку был более двух метров в высоту и мог изменять свое выражение лица посредством движения шестеренок и пружин в его голове.

Однако самым большим достижением Гакутенсоку была способность писать японские иероглифы. К сожалению, робот пропал во время гастролей в Германии.
Середина XX века: Первые нейронные сети и машина Тьюринга
Несмотря на то, что термин «робот» был впервые употреблен в 1920-х годах, только в 1942 году в коротком рассказе Айзека Азимова «Runaround» появился термин «робототехника». В этой истории Азимов изложил свои три знаменитых закона робототехники: роботы не должны вредить людям, роботы должны подчиняться приказам людей и роботы обязаны защищать себя от угроз при условии, что они не нарушат ни одного из первых двух законов. Хотя эти законы написаны в художественной литературе, они послужили основой для многих этических вопросов, связанных с роботами и автономными технологиями.
В 1940-х годах появились первые искусственные нейронные сети. В 1943 году Уоррен МакКаллок и Уолтер Питтс создали базовую нейронную сеть с использованием электрических цепей для лучшего понимания, как нейроны работают в мозге. Их эксперименты проложили путь для первых автономных роботов, которые могли отображать сложное поведение, благодаря использованию искусственных нейронных сетей.

В 1948 и 1949 годах Уильям Грей Уолтер создал двух таких роботов: Элмера и Элси по прозвищу «черепахи». Роботы могли реагировать и двигаться на свет и возвращались на подзарядные станции, когда их батареи разряжались.
Еще один знаменательный момент в истории робототехники произошел в 1950 году, когда Алан Тьюринг опубликовал результаты по испытанию искусственного интеллекта. Тест Тьюринга стал эталоном в этой сфере. Именно Тьюринг определил, в какой степени интеллект машины равен человеческому интеллекту или неотличим от него.

1950-е годы также ознаменовались созданием первого промышленного робота — Unimate. Патент на Unimate был подан Джорджем Деволом в 1954 году и представлял роботизированную руку, способную транспортировать отлитые детали на заводе. Эта революционная разработка навсегда изменила будущую промышленность.
- 2264 просмотра